在完成定标拍摄后,点击软件界面 【Calibration GUI】定标界面按钮,进入定标计算界面。如下:
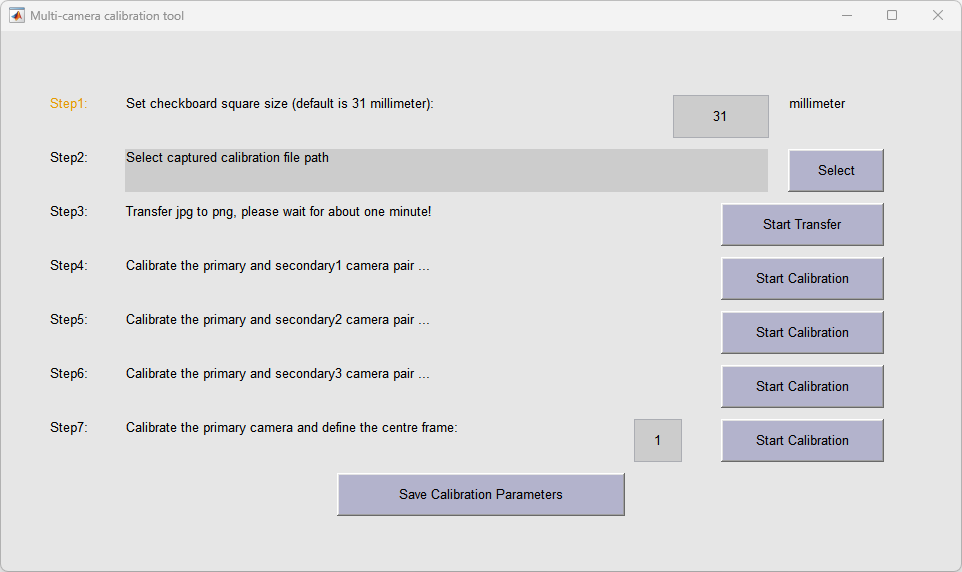
第一步Step1:设置标定板面积,指一个白色或黑色棋盘格的边长(单位mm)。舵机+显示器版本的默认为31,定标机器人版的默认25,还有其他动物或设备的,请输入相应的值。
第二步Step2:点击 Select按钮后,选择定标拍摄创建的工程, 以工程calibration_test为例。
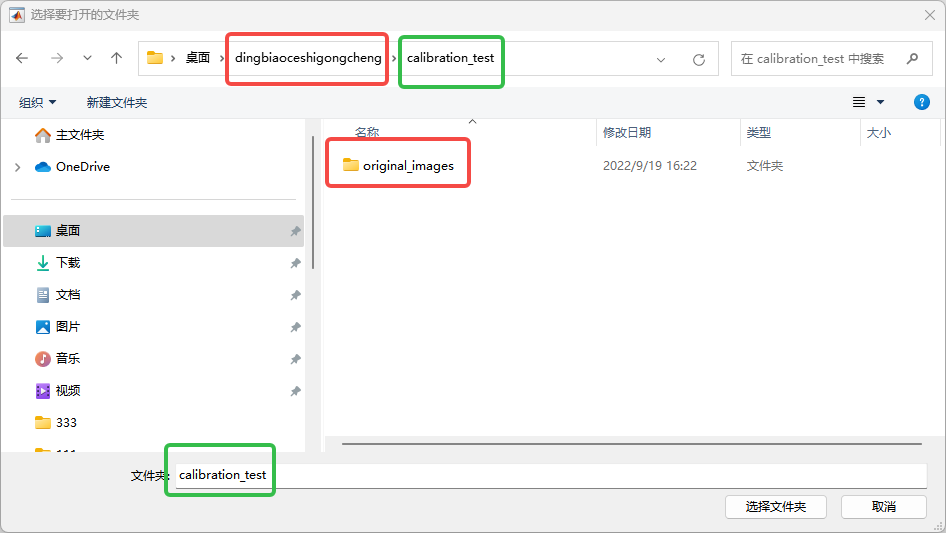
在这里,请注意,我们要选择的文件夹是绿色方框 calibration_test(此文件夹下只有original_images文件夹,里面存放了四个相机拍摄的定标图片),请勿选择红色方框上一级dingbiaoceshigongcheng文件夹或者下一级original_images文件夹。选择完成后,界面显示如下:
第三步Step3:点击 Start Transfer按钮后,会出现如下进度条:

进度条完成后,定标工程文件夹内正常会出现Imagesforcalibration文件夹。
可能出现的问题:
-
1.未出现进度条或者进度条一闪而过
请检查第二步的工程是否选择正确(可能误选上一级文件夹或者下一级文件夹)。如果工程没错,请检查工程内original_images文件夹下是否有0 1 2 3(部分版本有0 1 2 3 4 五个)四个文件夹,文件夹内是否存在定标照片。 -
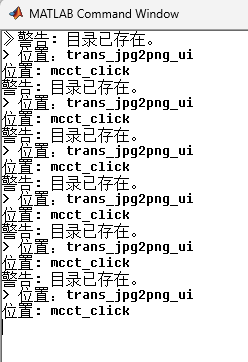
2.界面出现如下代码块
说明此工程,已经做过一次Step3,重复做会警告文件目录已存在。解决方法:删除工程下Imagesforcalibration文件夹。再重新点击Step3按钮。 -
3.界面出现如下代码块
说明此工程,已经做过一次Step4,重复做会警告文件目录已存在。解决方法:如果不影响正常操作,可正常继续下去。否则,关闭整个定标界面,将工程文件夹除了original_images文件夹以外的文件删除,点击软件界面 【Calibration GUI】定标界面按钮重新开始。
-
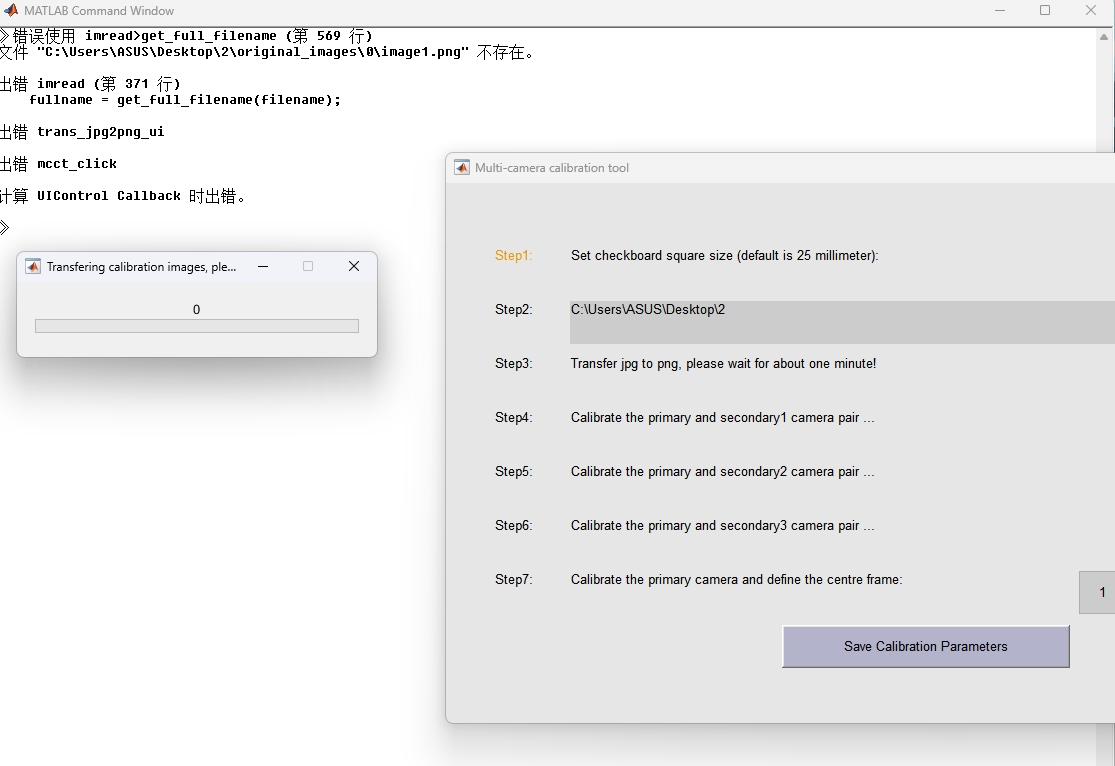
4.界面出现如下代码块
说明说明定标工程里缺少了某组相机的拍摄图片,建议打开工程看看是否有0 1 2 3(部分版本有0 1 2 3 4)文件夹,且文件夹存在照片。


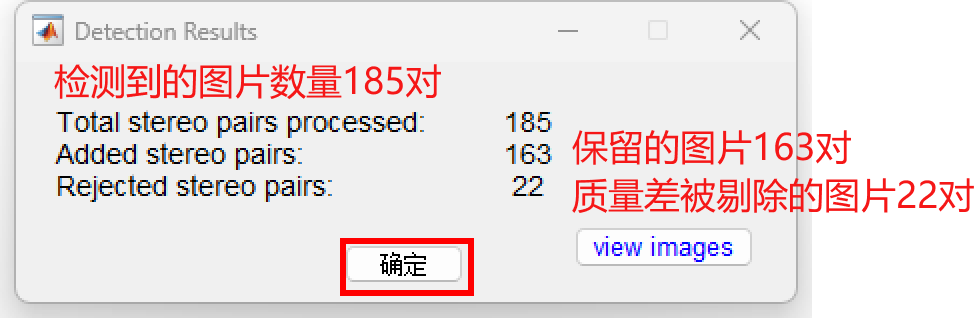
第四步Step4:点击 Start Calibration按钮,会弹出新界面及进度条,等待完成后,点击确定即可:
点击 界面Calibrate按钮进行定标重投影计算。
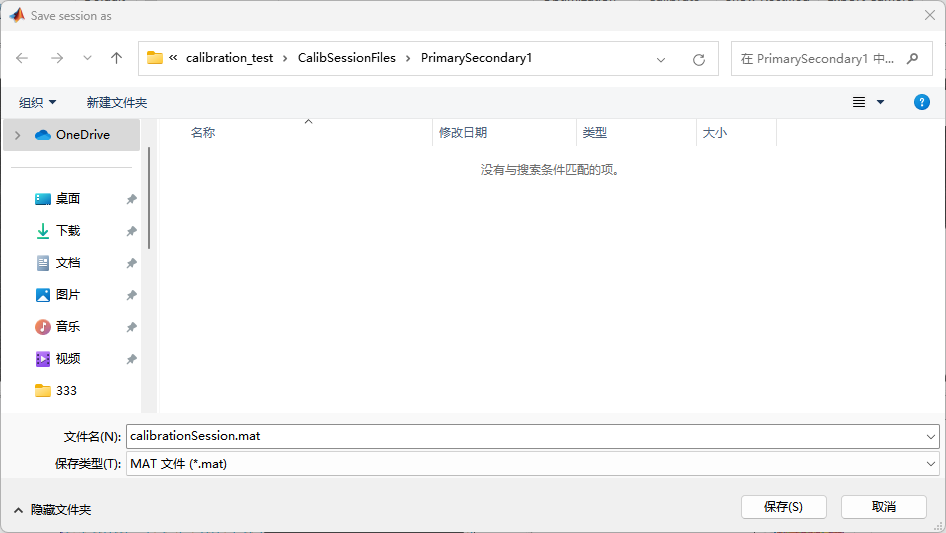
少量多次拉动error值,删除误差较大的图,重新计算。error值、相机相对位置没有问题即可点击Save Session,保存在默认路径即可。
可能出现的问题:
- 1.如果在拍摄的图片中没有检测到角点图,会弹出如下窗口
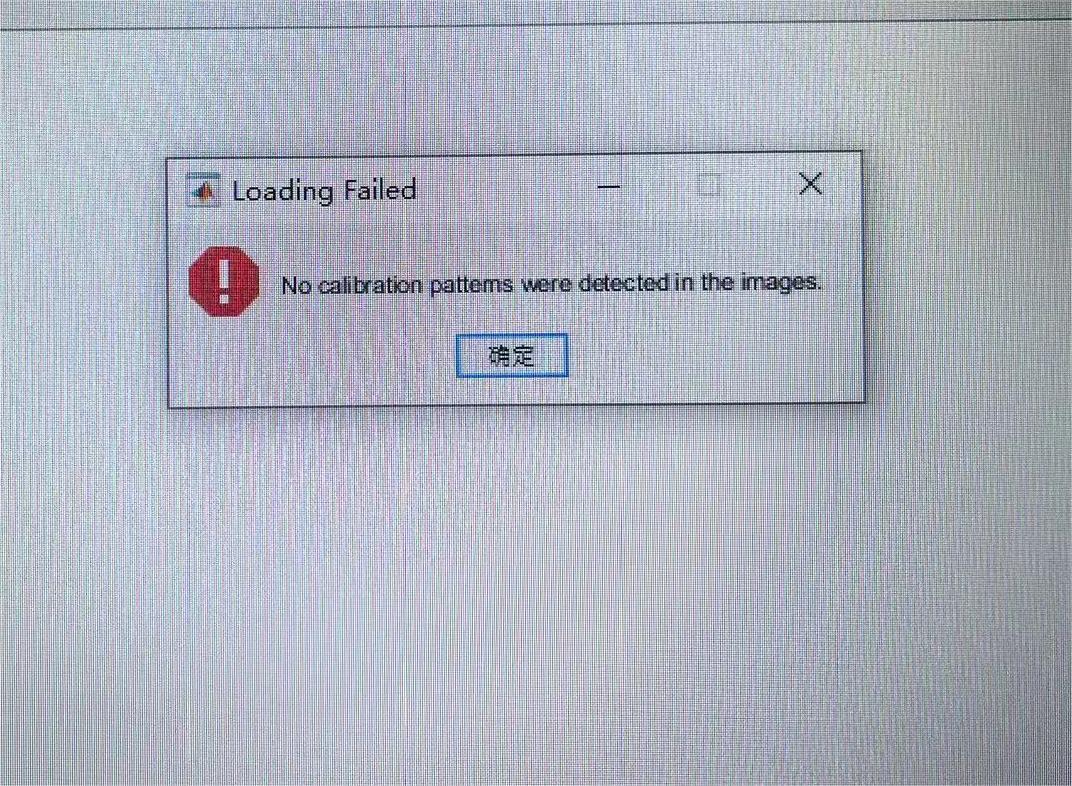
该问题常见于 Inf模式下定标,在此模式下进行定标拍摄时,不要开启外部添加的红外灯。需要重新进行定标拍摄。
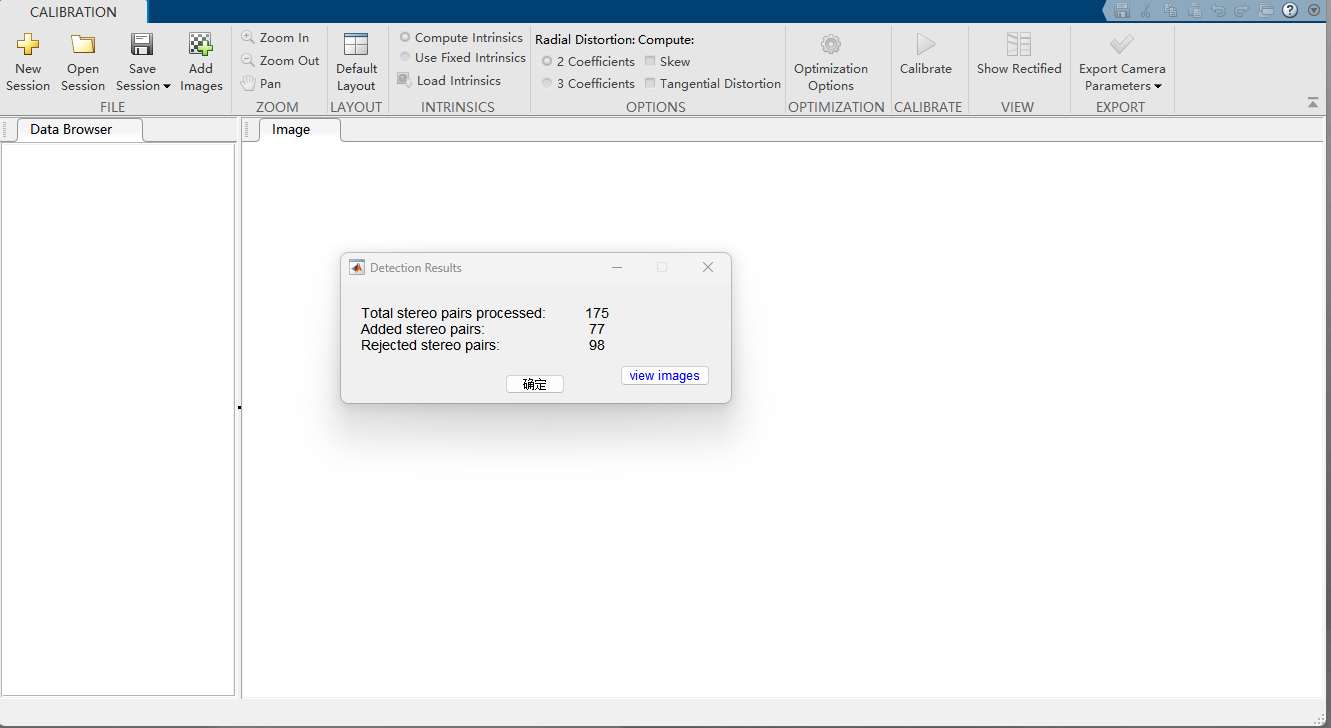
- 2.成功找到的角点图并进行反投影重建成功的数量太少或没有:

这组定标照片角点追踪效果不佳,需要重新选择拍摄角度或增大棋盘格重新进行定标拍摄。一般能有10张多角度多位置追踪重建效果好的图片,即可。
- 3.经过多次拉到error值,整体error值低于0.5,但相机相对位置有误。

请检查在定标拍摄过程中,定标显示器或定标机器人棋盘格是否进行了上下左右的倾斜偏转,定标拍
摄的图片是否是多角度多位置的。如果是否的话,请重新进行定标拍摄。
第五步Step5、第六步Step6操作同上
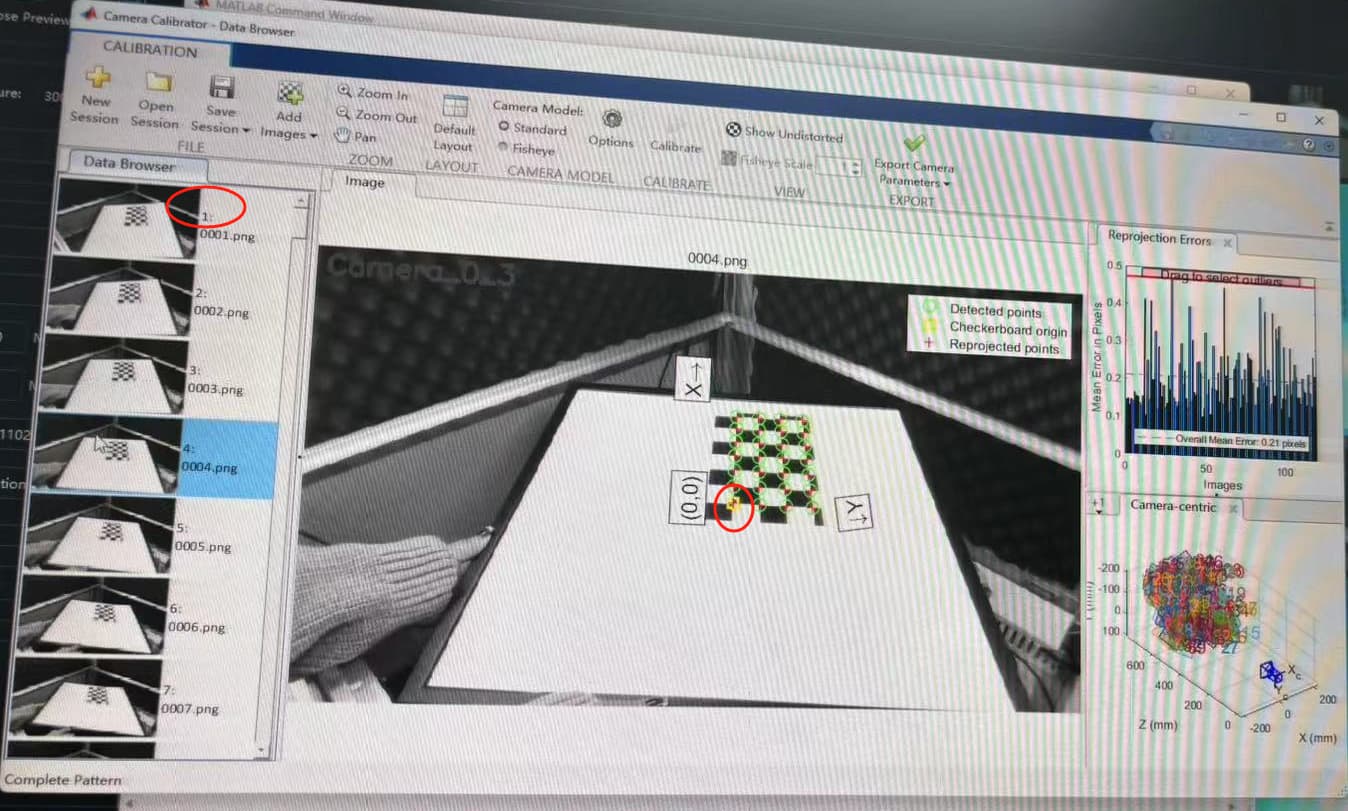
第七步Step7:点击 Start Calibration按钮,操作同上。选择(0,0)坐标在显示器正中间的角点图,并记住其编号1(不是图片名称001.png)。由于在定标拍摄过程中,一般要求拍摄前十张时,显示器或定标机器人保持水平居中,这种情况下角点追踪及重建效果比较好且(0,0)居中,所以如果按照标准流程操作的话,默认选第一张。
第八步:将第七步记下的编号填入输入框,并点击 Save Calibration Parameters,保存定标结果。
在后续进行实验录制选择定标文件时,选择1KB大小的calibrationParas.mat文件即可。

后续操作涉及Camera FOV Check,请参考: