一. 标定解释
多相机标定(Multi-camera Calibration)是多相机同步立体动作捕捉技术的关键,每个相机的位置和姿态信息对于确保捕捉到的数据能够准确对应到三维空间中的位置至关重要。标定过程的目的是:
- 确定内部参数:这包括焦距、主点坐标(图像中心)、径向和切向畸变系数等。这些参数描述了图像是如何从三维世界投影到二维图像平面上的。
- 确定外部参数:这涉及到每个相机在世界坐标系中的位置(位置向量)和姿态(旋转矩阵和平移向量)。这些参数允许我们将每个相机捕获的二维图像数据转换为统一的三维坐标系,从而实现多视角数据的融合和对齐。
二. 基本原理
通俗的来说,就是来确定多个相机在三维坐标系中如何摆放。
拿4相机举例说明,在标定过程中,主相机(0相机)的位置和姿态信息通常作为基准,其他相机的参数则相对于主相机来确定。这样做的好处是简化了系统的整体标定过程,因为所有相机的校正都是基于一个共同的参考系。
所以需要先进行:
1)主相机(0相机)-- 01相机
2)主相机(0相机)-- 02相机
3)主相机(0相机)-- 03相机
分别的两两标定,这样一来,4个相机的相对空间摆放就确定了。
但这仅仅是相对的坐标系,我们要确定一个和地面(也可能是拍摄的基准平台)的绝对的坐标系。这时候就需要进行整体的旋转,所以需要对主相机进行标定,标定过程除了要计算参数,还需要选择一个参考面。
三. 相机摆放意义
为了方便4视角标定,我们会让4视角做俯拍,让4视角有共同的视野交点便于标定。通常情况下,相机与拍摄中心呈现约为30°的视角较为合适。视角过高会导致小鼠画面占比较小,还无法拍摄到小鼠四肢,会影响后续的重建效果。视角过低则会导致拍摄不全,例如当老鼠竖起、攀爬时,可能会拍不到老鼠的头部或身体部位。
4相机视角参考:
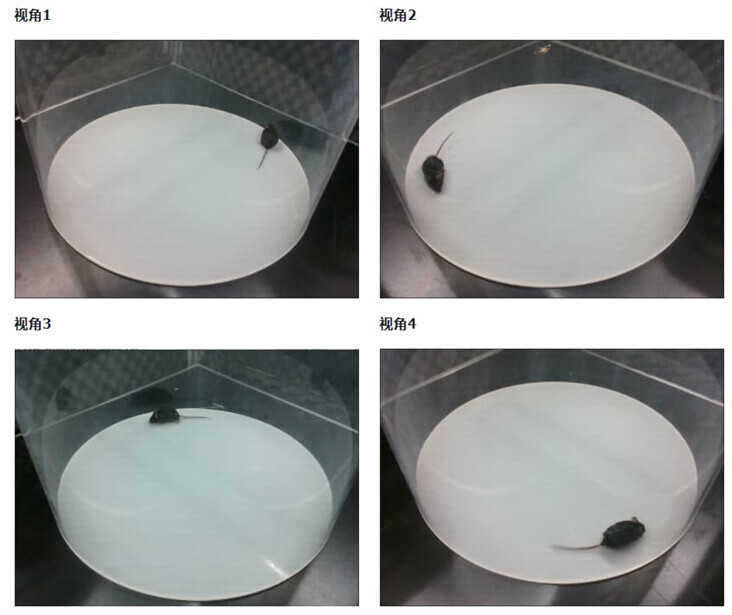
而在5相机拍摄时,会考虑增加一个顶部视角。顶部视角不仅能更直观的观测老鼠行动轨迹,同时水平四视角可以布置成水平拍摄,更加精细的拍摄小鼠肢体情况。
5相机标定时,我们需要把顶部相机作为主相机,这样主相机和水平其他相机会分别存在视野交点。先让主相机与水平4相机进行两两标定,最后再让主相机单独标定,选择一个水平参考面,就能实现5相机标定了。
参考资料:
计算机视觉基础——相机标定 - 知乎